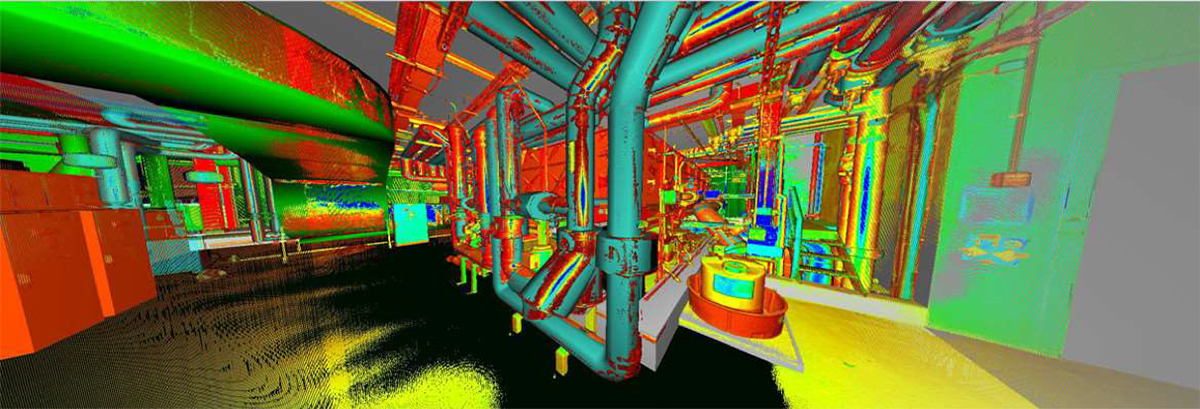
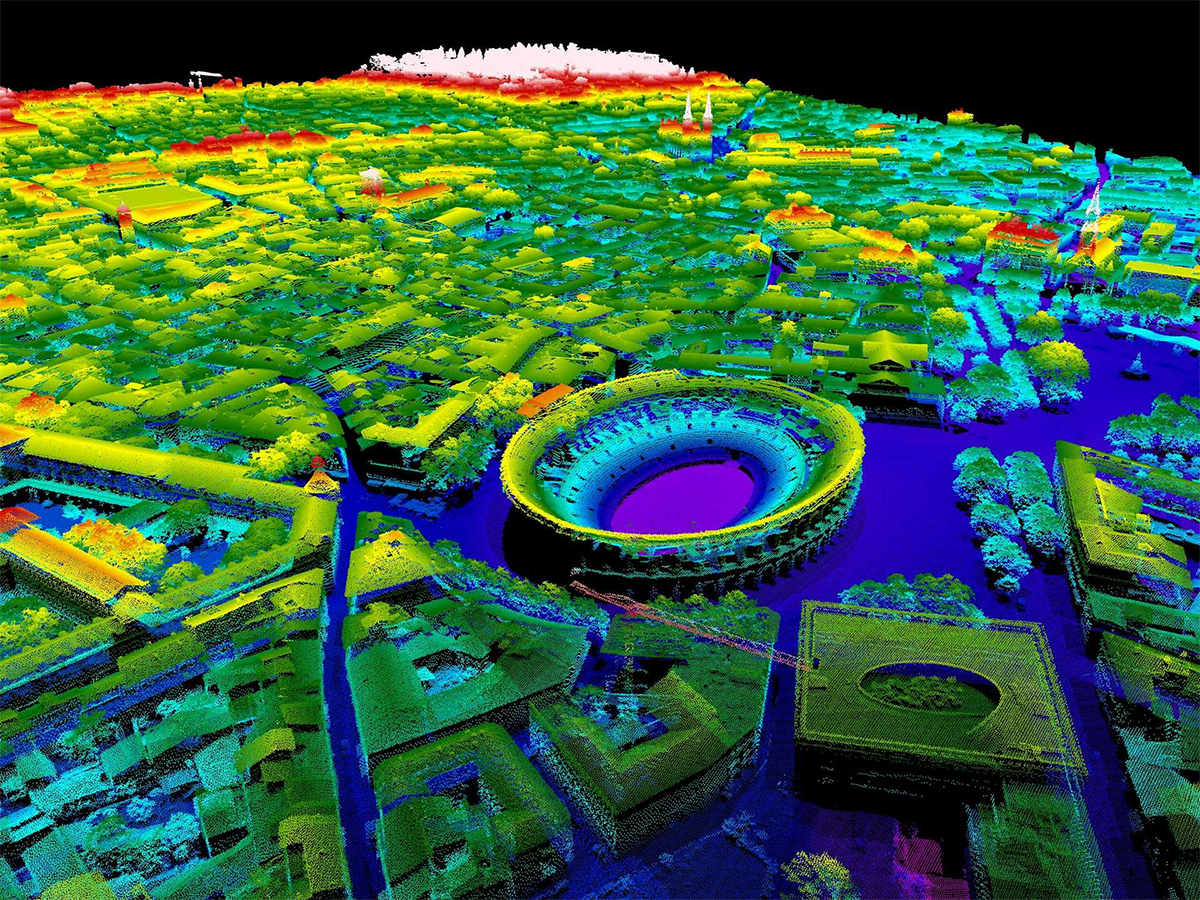
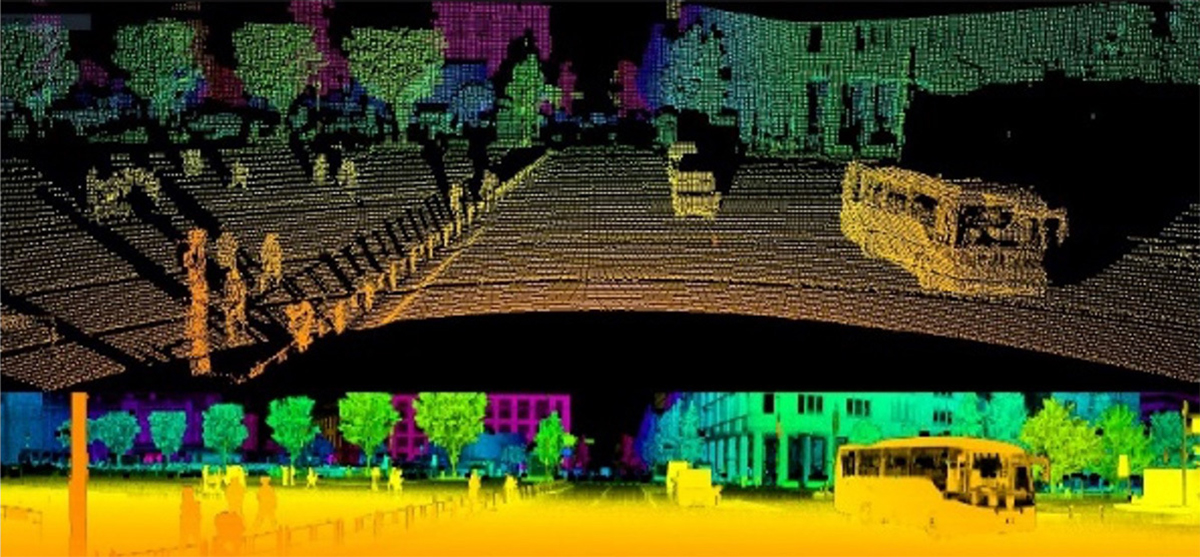
SISTEMA LIDAR
La tecnologia Lidar ha applicazioni in geologia, sismologia, archeologia, rilevamento. remoto e fisica dell’atmosfera.
La principale differenza fra lidar e radar è che il LIDAR (acronimo dall’inglese Light Detection and Ranging o Laser Imaging Detection and Ranging) è una tecnica di telerilevamento che permette di determinare la distanza di un oggetto o di una superficie utilizzando un impulso laser, oltre a determinare la concentrazione di specie chimiche nell’atmosfera e nelle distese d’acqua.
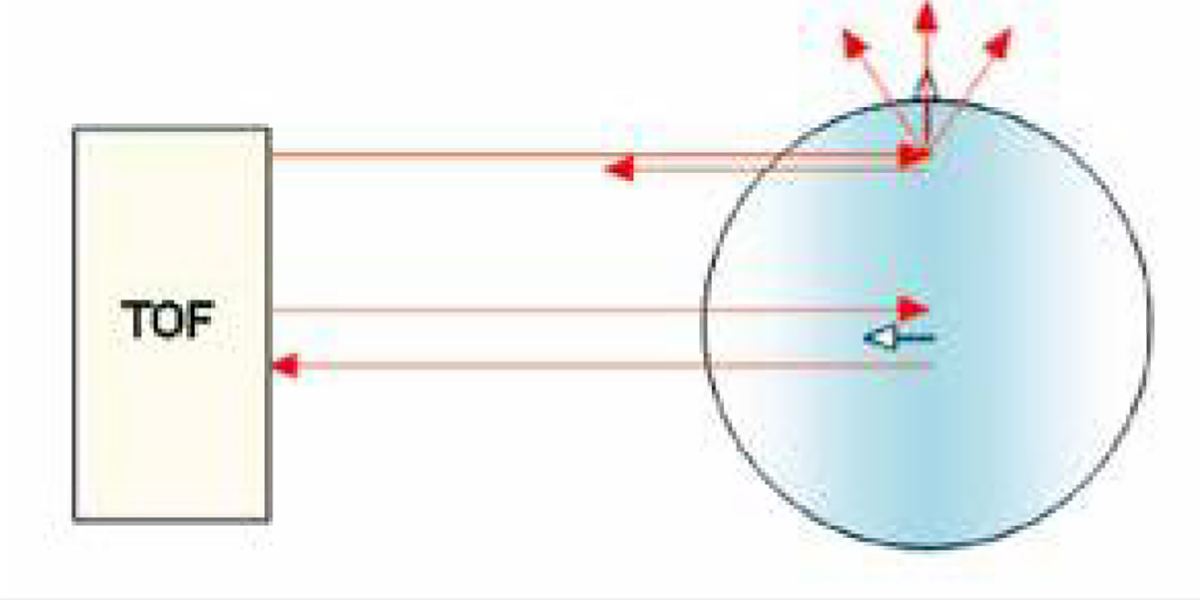
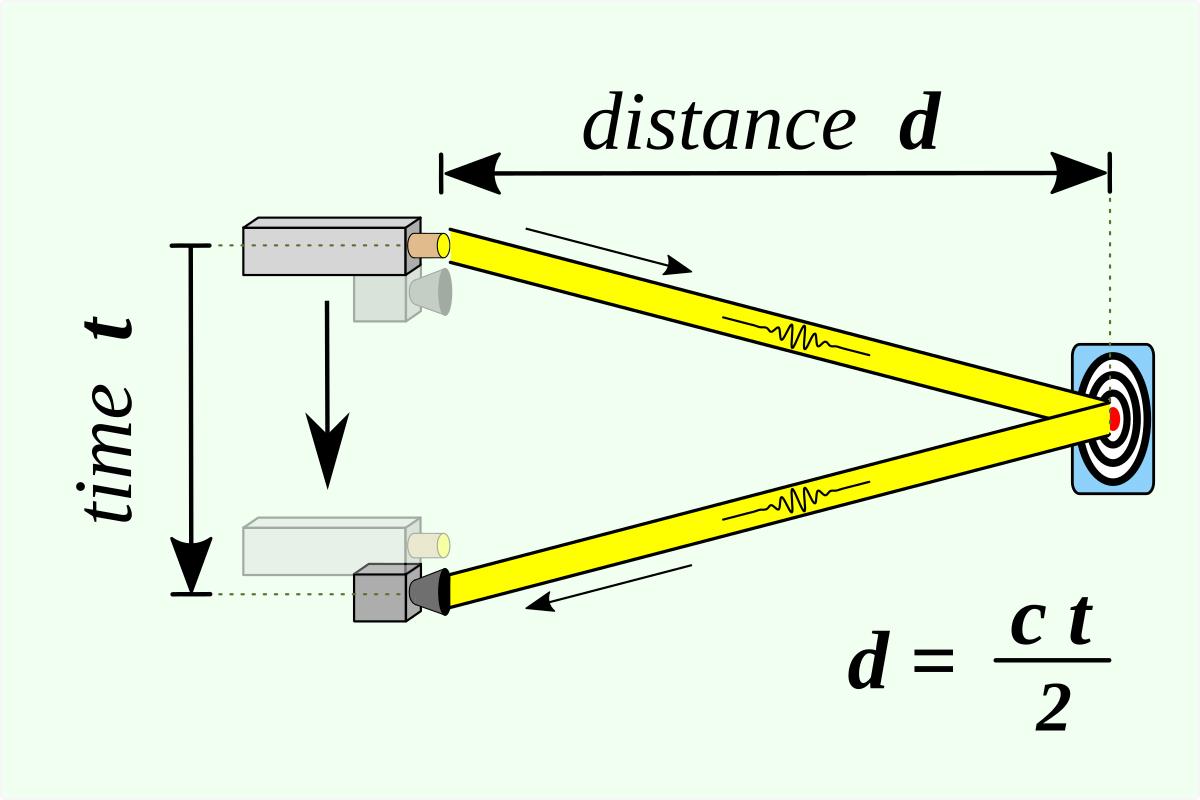
Come per il radar, che al posto della luce utilizza onde radio, la distanza dell’oggetto è determinata misurando il tempo trascorso fra l’emissione dell’impulso e la ricezione del segnale retro diffuso ( TOF). La sorgente di un sistema LIDAR è un laser, ovvero un fascio coerente di luce ad una precisa lunghezza d’onda, inviato verso il sistema da osservare. Il sistema LIDAR usa lunghezze d’onda ultraviolette, nel visibile o nel vicino infrarosso; questo rende possibile localizzare e ricavare immagini e informazioni su oggetti molto piccoli, di dimensioni pari alla lunghezza d’onda usata. Perciò il lidar è molto sensibile agli aerosol e al particolato in sospensione nelle nuvole ed è molto usato in meteorologia e in fisica dell’atmosfera.
Affinché un oggetto rifletta un’onda elettromagnetica, deve produrre una discontinuità dielettrica; alle frequenze del radar (radio o microonde) un oggetto metallico produce una buona eco, ma gli oggetti non-metallici come pioggia e rocce producono riflessioni molto più deboli, e alcuni materiali non ne producono affatto, risultando invisibili ai radar. Questo vale soprattutto per oggetti molto piccoli come polveri, molecole e aerosol.
I laser forniscono la soluzione: la coerenza e densità del fascio laser è ottima, la lunghezza d’onda è molto più breve dei sistemi radio, e va dai 10 micron a circa 250 nm. Onde di questa lunghezza d’onda sono riflesse bene dai piccoli oggetti, con un comportamento detto retrodiffusione.
I sistemi lidar aerei sono usati per il rilevamento di faglie, subsidenza e altri movimenti geologici, per monitorare i ghiacciai, nella silvicoltura, nel controllo della velocità dei singoli veicoli, in ambito militare la loro maggiore risoluzione li rende particolarmente adatti a ricavare immagini tanto dettagliate da permettere di riconoscere il tipo esatto di bersaglio.
TECNOLOGIA TEMPO DI VOLO
I sensori basati sul tempo di volo utilizzano una tecnologia esistente da vari anni, tuttavia si sono diffusi nel mercato consumer soltanto negli ultimi tempi dopo una sensibile riduzione dei costi di produzione.
I sensori calcolano la distanza fra la sorgente e la superficie che si desidera misurare calcolando il tempo che la sorgente luminosa puntiforme impiega per arrivare sulla superficie del sensore.
Gli impulsi luminosi sono segnali infrarossi inviati tramite una sorgente di luce modulata e il ricevitore è una matrice di sensori CCD/CMOS.
La misurazione viene eseguita in maniera indipendente per ogni pixel della telecamera, permettendo di acquisire interamente la scena inquadrata.
Le telecamera TOF (Time Of Flight) che si basano su questo principio sono in genere caratterizzate da una risoluzione di alcune migliaia di pixel e da un range di misura che varia da alcune decine di centimetri ad un massimo di 30 metri. Queste telecamera sono in grado di fornire in tempo reale l’insieme dei punti (x, y, z), l’immagine di prossimità, l’immagine di ampiezza e l’immagine di intensità.
VANTAGGI:
- È un sistema compatto dal basso costo che non richiede particolari operazioni di installazione, al contrario di altri sistemi con maggiore accuratezza come gli scanner laser.
- Fornisce direttamente una mappa di profondità, al contrario di telecamere stereo per le quali devono essere eseguiti algoritmi particolari per il calcolo della disparità e la triangolazione.
- Effettua la misurazioni di tutta la scena inquadrata in tempo reale; esegue tutti i calcoli utilizzando il microprocessore interno in maniera molto rapida ed efficiente, dando la possibilità di restituire solo i risultati tramite interfacce diffuse (USB o Fast Ethernet). Non richiede pertanto particolari requisiti per il computer a cui è collegato.
- E una tecnologia più robusta ai cambiamenti di luce rispetto ad altri sensori come le telecamere
SVANTAGGI:
- La scarsa risoluzione permette di ricavare un’informazione limitata sulla geometria della scena e sulle superfici presenti.
- Per materiali poco riflettenti (ad esempio una stoffa) o di colore scuro non è possibile ottenere misure accurate causa il debole segnale di ritorno.
- Si possono verificare sbilanciamenti nelle rilevazioni causa errate disposizioni del sensore o angoli di inquadratura. Il “multipath error” è un esempio: nel caso di una scena con geometrie concave (due parenti incidenti), il segnale luminoso colpisce una parete, ma il segnale riflesso colpisce la seconda parete prima di essere diretto verso il sensore.
In questo caso, la distanza della parete rilevata risulta maggiore rispetto a quella reale. - La rilevazione della distanza lungo i bordi di superfici risulta imprecisa. I punti appartenenti a superfici che presentano un angolo di curvatura troppo ampio con la direzione della camera sono affetti da scarsa affidabilità nella stima della loro distanza.
In questi tratti il segnale luminoso viene riflesso in più direzioni e il ricevitore rileva solo una parte del segnale di ritorno; questa difficoltà fisica unita alla risoluzione limitata, costringe il sensore TOF a generare un valore di profondità unico per più particolari dell’immagine. - Sorgenti luminose esterne come il sole possono interferire con il segnale del sensore, generando errori in fase di ricezione.
- Attenuazione e riessione del segnale IR sui bordi di un oggetto.
Attenuazione e riessione del segnale IR sui bordi di un oggetto

DIFFERENZA DI FASE
I laser scanner a differenza di Fase (Phase Shift – PS) calcolano la distanza attraverso algoritmi specifici che rilevano la misura tramite la differenza di fase tra l’onda emessa e quella ricevuta.
Tali laser scanner sono particolarmente veloci ed hanno una griglia di punti molto densa.
Tuttavia la loro possibilità di sfasamento però limita di parecchio la gittata massima, che rimane di alcune centinaia di metri.
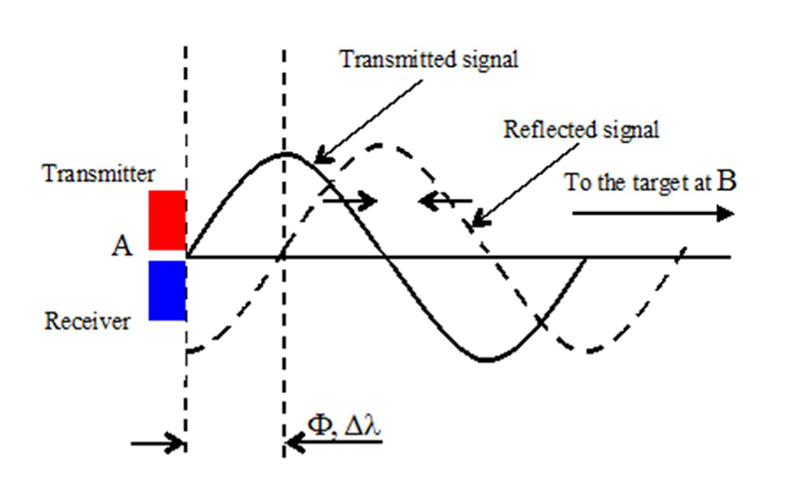
Questa tipologia di laser scanner si basano sul principio d’emissione ottica dell’infrarosso, modulata e trasmessa su un prisma retro riflettente. Il prisma riflette parte dell’onda verso il ricevitore che modula e converte la differenza di fase tra onda emessa e ricevuta. Lo sfasamento dipenderà tra la distanza del distanziometro e il prisma. L’energia dell’onda emessa è particolarmente importante ai fini di poter ricevere buona parte della luce emessa, sarà quindi necessario l’utilizzo di lunghezze d’onda di tipo NIR (infrarosso vicino).
Per discriminare la fase con precisione costante sarà necessario l’utilizzo di una onda metrica, pertanto è basilare modulare correttamente l’onda elettromagnetica.