Telecamere
La funzione delle telecamere industriali è quella di catturare l’immagine proiettata sul sensore, attraverso una lente, per poterla trasferire attraverso un’interfaccia di comunicazione ad un PC e poterla quindi visualizzare, memorizzare o per effettuare su di essa delle misure o delle analisi.
Le telecamere hanno avuto una rapida evoluzione negli ultimi anni, dalle prime telecamere basate su tubi Vidicon o Plumbicon fino alle più moderne telecamere provviste di sensori CCD (Charge Coupled Device) e CMOS (Complementary Metal Oxide Semiconductor).
Le telecamere utilizzate nella visione industriale e scientifica richiedono una serie di caratteristiche non comuni nelle classiche webcam e nemmeno nelle più sofisticate macchine fotografiche presenti sul mercato: è ad esempio necessario avere un completo controllo del tempo di esposizione, dei guadagni e della risposta colorimetrica della camera stessa. È necessario potere controllare esattamente l’istante in cui la camera dovrà acquisire un’immagine tramite un eventuale segnale elettrico, pilotare con la medesima precisione un illuminatore in modo che produca il flash luminoso sincronizzato con la fase di acquisizione dell’immagine da parte della camera. Deve essere inoltre possibile trasferire nel modo più efficiente l’immagine verso il computer di elaborazione.
Una telecamera può essere schematizzata in tre macro blocchi:
- Sensore.
- Elettronica di pilotaggio e di eventuale conversione.
- Interfaccia di comunicazione.
- L’utilizzo di diversi sensori e di diverse interfacce contribuisce a creare il vasto mondo delle telecamere nei sistemi di visione.
IL SENSORE
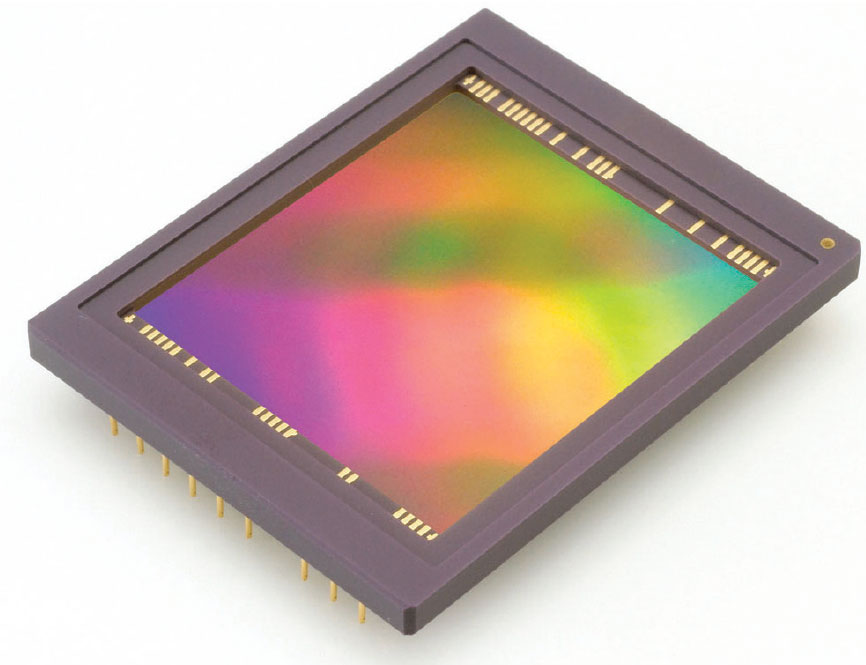
Il sensore è un insieme di elementi fotosensibili in grado di accumulare luce e di convertirla in un segnale elettrico.
La disposizione di questi elementi fotosensibili in una matrice o lungo una singola linea definisce una prima distinzione tra telecamere matriciali e lineari.
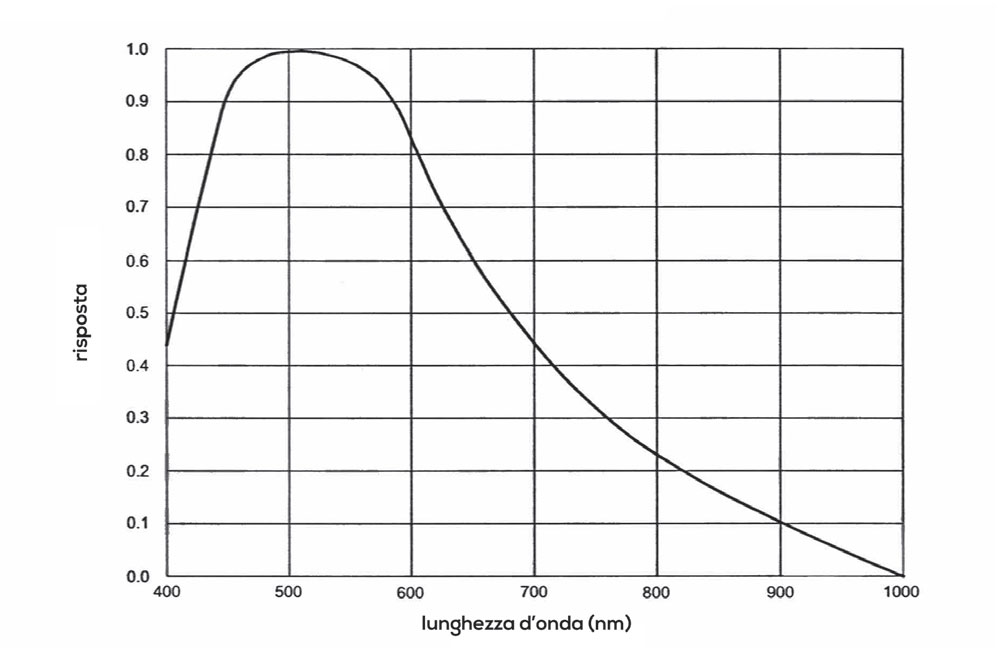
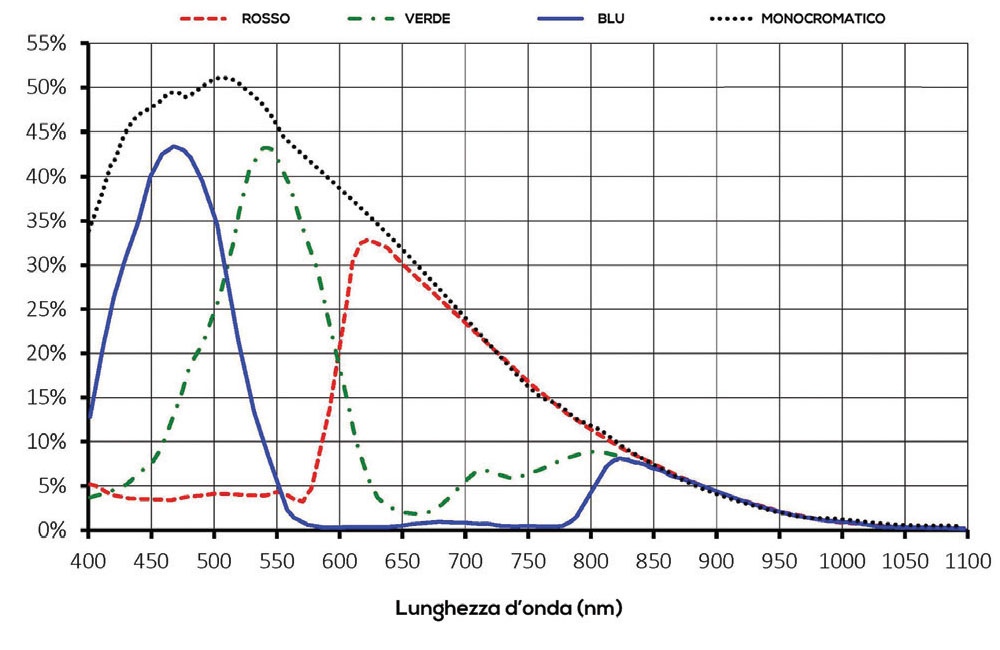
La sensibilità degli elementi fotosensibili al completo spettro visibile o a definite bande come ad esempio al rosso, verde e blu definiscono camere monocromatiche o a colori.
In ambito scientifico, medicale o industriale vengono inoltre utilizzate telecamere sensibili a lunghezze d’onda non percepibili dal l’occhio umano, alcuni esempi sono:
- Telecamere termiche in grado di rilevare la radiazione termica emessa da un corpo.
- Telecamere x-ray sensibili alla gamma raggi x usata in ambito medicale o industriale.
- Interfaccia di comunicazione.
- Telecamere near IR e UV sensibili rispettivamente all’infrarosso e all’ultravioletto.
In funzione della lunghezza d’onda che la telecamera deve acquisire vengono usati sensori:
- CCD o CMOS per la radiazione visibile e la radiazione near-IR.
- Sensori CCD o CMOS con un substrato in grado di convertire la radiazione UV o la radiazione x-ray in radiazione visibile.
- Sensori con tecnologie completamente differenti come i micro bolometri per le telecamere termiche.
I sensori delle telecamere moderne sono per lo più CMOS, ogni singolo pixel è composto di un materiale sensibile alla luce che converte i fotoni in carica elettrica. Un’elettronica di contorno si occupa di trasferire il segnale da ogni singolo pixel per formare l’immagine e trasferirla al computer tramite un’interfaccia.
In ambiente industriale la risoluzione delle telecamere può arrivare fino a 80 Megapixel e il numero di immagini acquisite al secondo può spingersi fino ad alcune centinaia utilizzando l’intero sensore e fino ad alcune migliaia selezionando una regione (ROI) del sensore. Fino a 100000 linee al secondo per le telecamere lineari.
Il collegamento Telecamera-Computer avviene attraverso standard di comunicazione e attualmente gli standard più diffusi sono basati su porte gigabit Ethernet e USB3, telecamere particolarmente performanti richiedono tuttavia delle schede dedicate all’interno del PC per poter essere utilizzate.
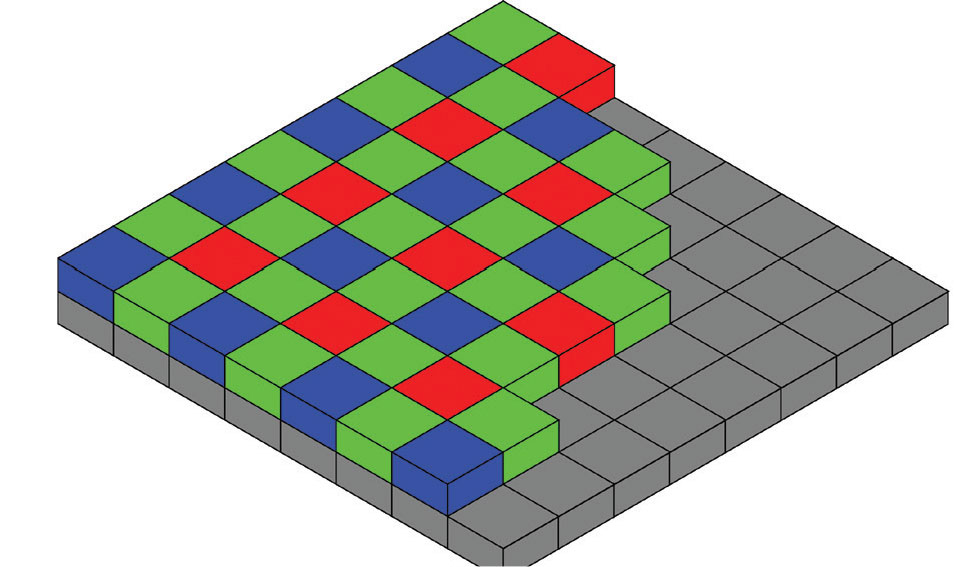
TELECAMERE CON SCHEMA BAYER
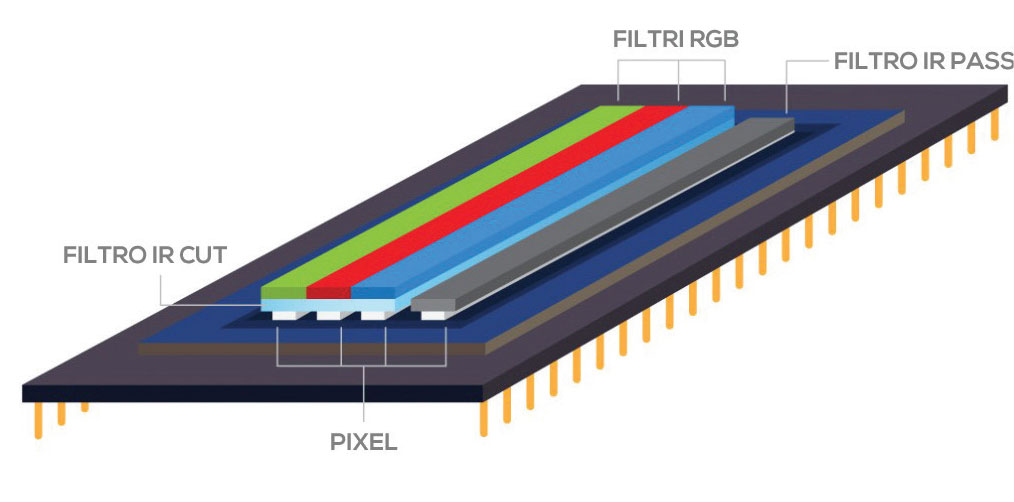
Le telecamere a colori che utilizzano questa tecnologia sono basate su un singolo sensore monocromatico sul quale è applicato un filtro R, G o B davanti ad ogni singolo pixel secondo uno schema predefinito. Questa tecnologia è nota come Bayer pattern e prende il nome da Bryce Bayer, ricercatore della Kodak che lo propose per primo.
- Il filtro R lascia passare solo la radiazione rossa.
- Telecamere x-ray sensibili alla gamma raggi x usata in ambito medicale o industriale.
- Il filtro G lascia passare solo la radiazione verde.
- Il filtro B lascia passare solo la radiazione blu.
Come si può vedere, sono presenti il doppio dei pixel con filtro verde rispetto a quelli con blu o rosso. Questo rende la risposta della telecamera più simile alla risposta dell’occhio umano.
È evidente che un pixel con filtro R non conterrà informazione blu e verde, le informazioni mancanti per ogni pixel vengono ricostruite interpolando tra pixel adiacenti.
Questa interpolazione può essere effettuata direttamente dalla telecamera, in questo caso la telecamera trasferirà verso il PC un’immagine RGB, in alternativa la telecamere può trasferire l’immagine in scala di grigi non interpolata (RAW) es il computer si occuperà dell’interpolazione per produrre immagini RGB.
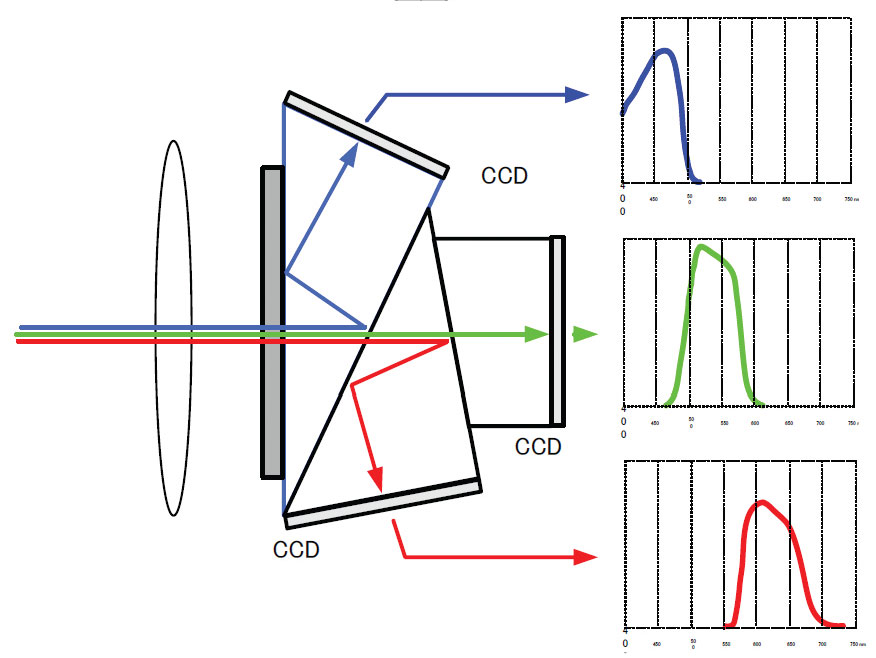
TELECAMERE A PRISMA
Queste telecamere matriciali a colori incorporano un prisma e tre sensori.La luce dall’oggetto passa attraverso la lente ed è divisa dal prisma in tre direzioni. In ciascuno dei tre lati del prisma vi è un filtro colore (rosso, verde e blu) e un sensore che cattura la luce di ciascun colore. Internamente, la telecamera combina i colori RGB. In questo caso ogni pixel ha tutte le informazioni di colore, la risoluzione e la resa cromatica delle telecamere a prisma sono di gran lunga superiori a quelle a singolo sensore ma presentano degli inconvenienti. Le telecamere a prisma sono più delicate ed ingombranti, richiedono più luce poiché il prisma assorbe parte della luce che passa attraverso la lente e viene generato un effetto di aberrazione cromatica a causa della struttura del prisma. Questa aberrazione può essere corretta usando lenti appositamente progettate per telecamere a prisma.
Con la stessa tecnologia del prisma vengono prodotte anche telecamere a quattro sensori in grado di acquisire immagini a colori e near-IR nonché telecamere a doppio sensore in cui un sensore può essere Bayer e uno monocromatico per la radiazione near-IR.
Esistono inoltre telecamere con due sensori monocromatici o due sensori Bayer, in questo caso si sfruttano due sensori basati sulla stessa tecnologia per produrre immagini ad altissima dinamica.
Questa tecnica utilizza i due sensori con differenti valori di guadagno o di tempo di integrazione, attraverso un opportuno software è possibile poi fondere le due immagini provenienti dai due sensori in un’unica immagine.

CARATTERISTICHE COMUNI DI TELECAMERE MATRICIALI
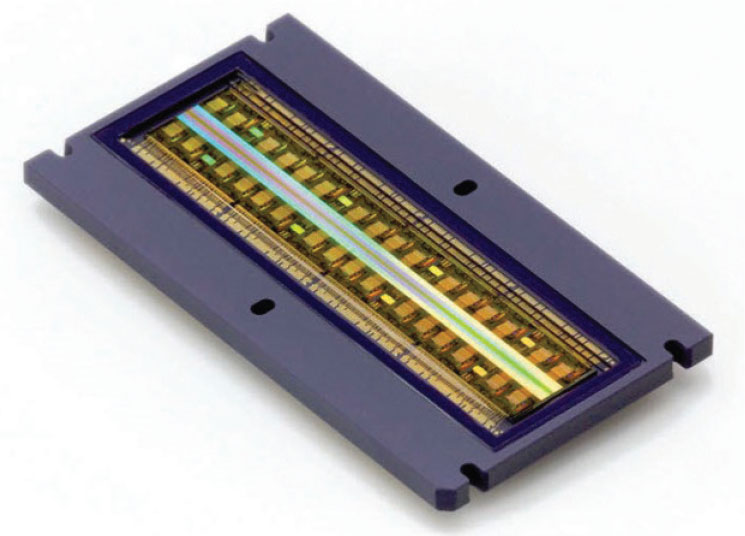
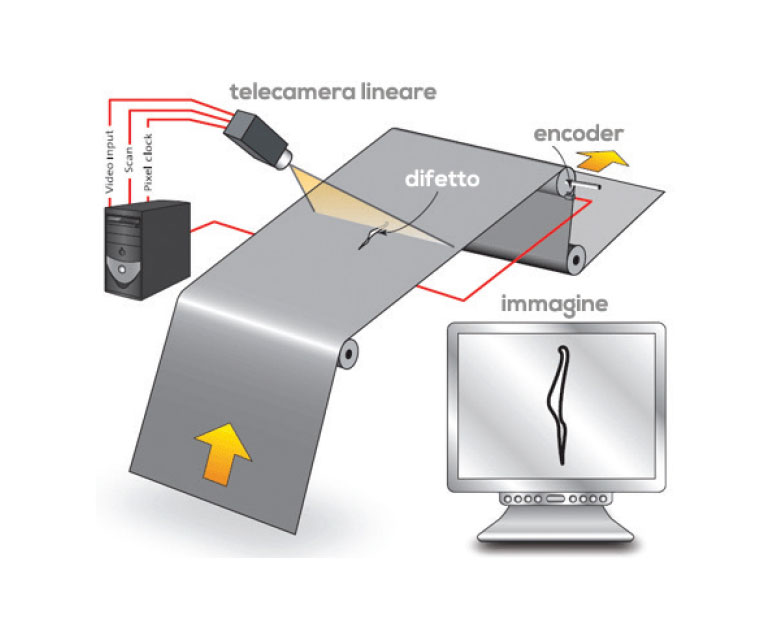
TELECAMERE LINEARI
TELECAMERE LINEARI: CARATTERISTICHE TECNICHE
Le telecamere lineari si classificano abitualmente in termini di numero di elementi del sensore e di velocità. Esistono tipi speciali di telecamere lineari come le TDI e le telecamere a colori che si descriveranno più avanti.
NUMERO DI ELEMENTI DEL SENSORE O NUMERO DI PIXEL
Quanto maggiore è il numero di pixel maggiore sarà la grandezza del sensore e della lente necessaria. La maggior parte dei sensori fino a 1024 pixel utilizzano lenti a passo C. Quando il sensore è di 2084 pixel o più, il formato della lente deve essere del tipo F o superiore come M42 o M72, affinché il diametro della lente sia abbastanza ampio da permettere alla luce di incidere su tutto il sensore e non produrre effetti di vignettatura.
TELECAMERE LINEARI MONOCROMATICHE
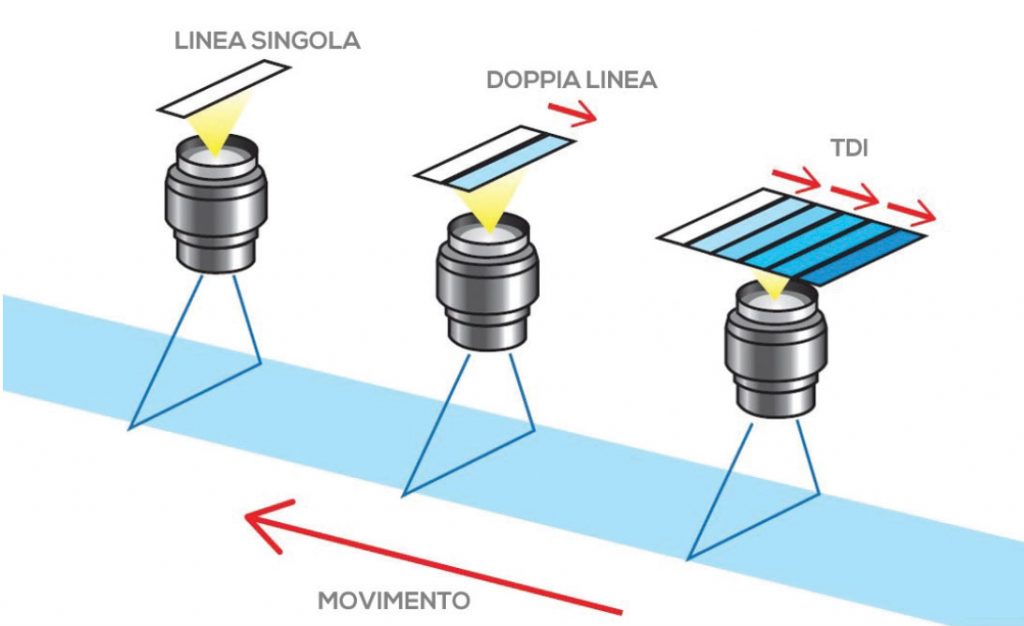
TELECAMERE LINEARI TDI
In una telecamera lineare convenzionale l’esposizione massima è limitata dalla frequenza di linea. Questo significa che è necessaria molta più luce che in una telecamera matriciale dove la massima esposizione è limitata dalla frequenza di frame.
Questo può limitare la velocità alla quale la telecamera lineare può funzionare e rende praticamente impossibili le applicazioni ad alta velocità e bassa illuminazione come nel caso in cui si debba utilizzare un illuminazione diffusa.
La tecnologia TDI (Time Delay Integration) sposta le cariche accumulate da una linea alla successiva in modo sincronizzato con il movimento dell’oggetto, per catturare riprese multiple della stessa linea e sommarle, ottenendo così una linea con sensibilità amplificata.
Le telecamere più moderne sono dotate di sensori a 256 linee selezionabili (stadi TDI), in questo modo la sensibilità della telecamera viene amplificata di 256 volte rispetto ad una telecamera lineare convenzionale.
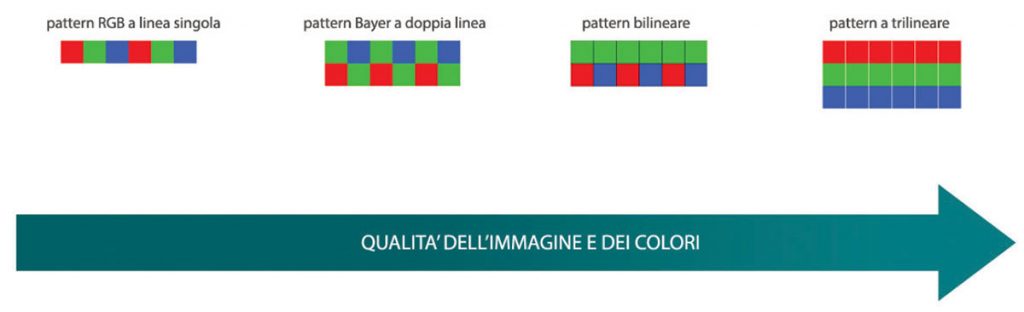
TELECAMERE TRILINEARI
In questo tipo di dispositivi il sensore è composto da tre linee distinte, per motivi di accesso ai pixel di oggi linea le tre linee vengono separate da un numero preciso di pixel.
Le telecamere che utilizzano questi sensori sono definite: trilineari. Lo spazio tra i sensori è compensato attraverso operazioni a livello software. Questa tecnologia caratterizzata da una buona sensibilità (simile alle telecamere monocromatiche) si può utilizzare solo in applicazioni con superfici piane e con telecamera posizionata perpendicolarmente rispetto all’oggetto da riprendere.
Il vantaggio di queste telecamere rispetto alle bilineari è rappresentato dall’assenza di interpolazione.
TELECAMERE A PRISMA
Come per le telecamere matriciali, anche in questo caso tre sensori vengono posizionati nei tre lati di un prisma. Questo tipo di telecamera si può utilizzare in qualsiasi applicazione in ragione del fatto che i pixel R, G e B coincidono con la stessa posizione sull’oggetto inquadrato.
Occorre considerare che il prisma riduce la trasmissione della luce e per tanto il sensore dovrà essere più sensibile o in alternativa si dovrà utilizzare un’illuminazione più intensa. Il prisma introduce inoltre un’aberrazione cromatica che può essere corretta con lenti speciali.
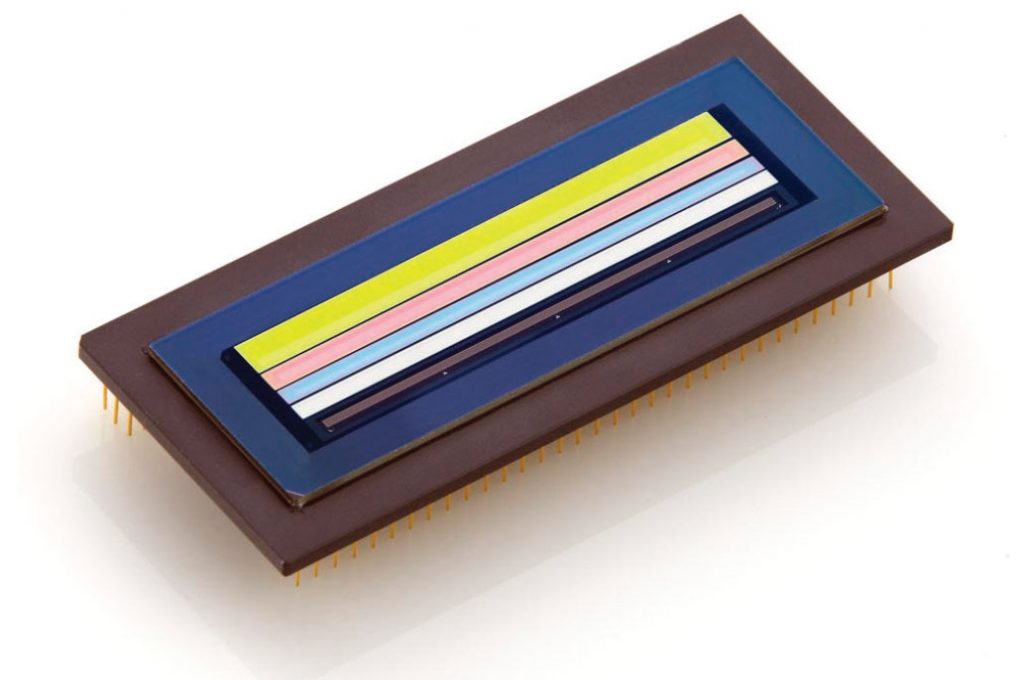
TELECAMERE QUADRI-LINEARI
Sono l’ultima novità nel campo delle telecamere lineari a colori. Sono telecamere con 4 sensori capaci di lavorare simultaneamente nei canali rosso, verde, blu e near-IR oppure con 4 polarizzazioni della luce differenti. Queste telecamere possono essere realizzate sia con la tecnica dell’affiancare quattro linee con opportuni filtri su ogni linea, sia con la tecnica del prisma, 4 distinti sensori e di e di filtri inter referenziali per permettere uscite separate con un asse ottico comune.